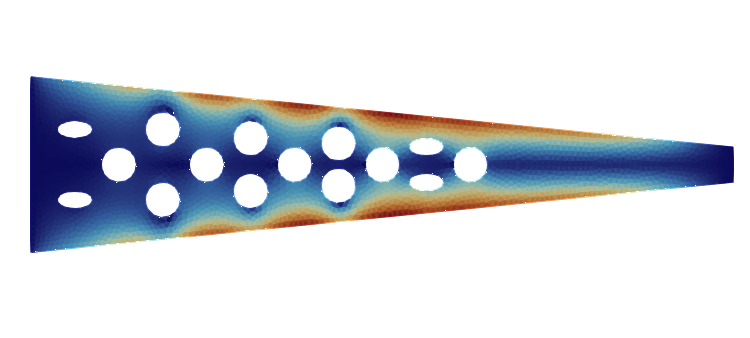
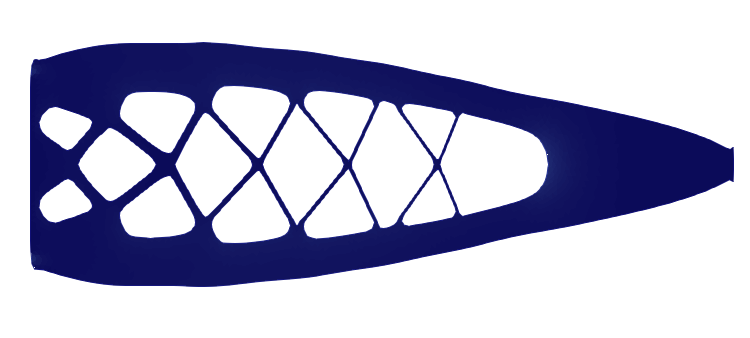
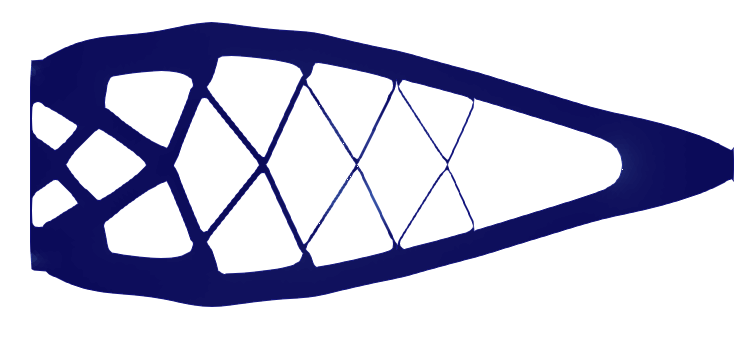
Problem konzole
Greda učvršćena na jednom kraju, a na drugom postoji primjena sile prema dolje. Problem je pronaći optimalnu geometriju koja minimizira deformaciju pod zadanom silom. Račun derivacije funkcionala elastične podložnosti (compliance)
\[
\int_\Omega A\,\varepsilon(u) : \varepsilon(u)\,\mathrm{d}x
\]
možete pronaći na poveznici.
load "iovtk"
ofstream data("data.txt");
real E=15; // Youngov modul
real nu=0.35; // Poisson koeficijent
func g1=0;
func g2=-0.5*(y-0.4)*(0.6-y);
//////////////////////////////////////////
// Računanje Lameovih koeficijenta
//////////////////////////////////////////
real lambda=E*nu/((1.+nu)*(1.-2.*nu));
real mu=E/(2.*(1.+nu));
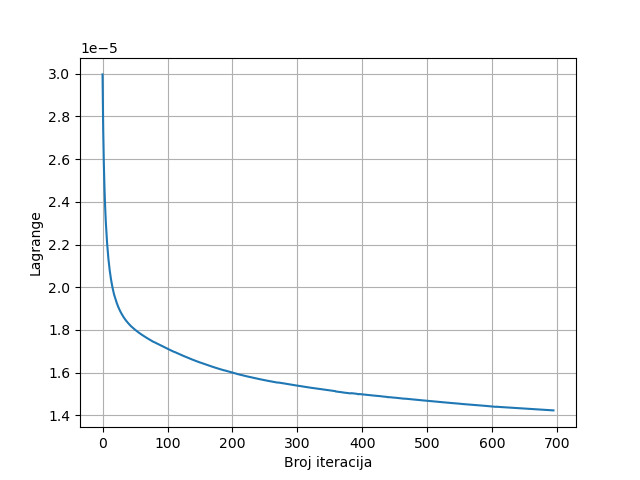
real lagr=3.8*1e-6;
func truncate=(( (abs(x)<0.002 ) || (abs(x-4)<0.005 && abs(y-0.5)<0.2 ) )? 0:1);
//////////////////////////////////////////
// Mesh
//////////////////////////////////////////
border shapeDirichlet(t=0,1){ x=0; y=1-t; label=1; }
border shapeDown(t=0,4){ x=t; y=0.1*t; label=3; }
border shapeNeumann(t=0.4,0.6){ x=4; y=t; label=2; }
border shapeUp(t=0,4){ x=4-t; y=0.6+0.1*t; label=3; }
border hole01(t=0,2*pi){ x=0.5+0.1*cos(t); y=0.5+0.1*sin(t); label=3;}
border hole02(t=0,2*pi){ x=1+0.1*cos(t); y=0.5+0.1*sin(t); label=3;}
border hole03(t=0,2*pi){ x=1.5+0.1*cos(t); y=0.5+0.1*sin(t); label=3;}
border hole04(t=0,2*pi){ x=0.75+0.1*cos(t); y=0.7+0.1*sin(t); label=3;}
border hole05(t=0,2*pi){ x=0.75+0.1*cos(t); y=0.3+0.1*sin(t); label=3;}
border hole06(t=0,2*pi){ x=1.25+0.1*cos(t); y=0.65+0.1*sin(t); label=3;}
border hole07(t=0,2*pi){ x=1.25+0.1*cos(t); y=0.35+0.1*sin(t); label=3;}
border hole08(t=0,2*pi){ x=2.0+0.1*cos(t); y=0.5+0.1*sin(t); label=3;}
border hole09(t=0,2*pi){ x=1.75+0.1*cos(t); y=0.62+0.1*sin(t); label=3;}
border hole10(t=0,2*pi){ x=1.75+0.1*cos(t); y=0.38+0.1*sin(t); label=3;}
border hole11(t=0,2*pi){ x=2.5+0.1*cos(t); y=0.5+0.1*sin(t); label=3;}
border hole12(t=0,2*pi){ x=2.25+0.1*cos(t); y=0.60+0.05*sin(t); label=3;}
border hole13(t=0,2*pi){ x=2.25+0.1*cos(t); y=0.40+0.05*sin(t); label=3;}
border hole14(t=0,2*pi){ x=0.25+0.1*cos(t); y=0.7+0.05*sin(t); label=3;}
border hole15(t=0,2*pi){ x=0.25+0.1*cos(t); y=0.3+0.05*sin(t); label=3;}
int nn=5;
mesh Omega=buildmesh(shapeDirichlet(nn)+shapeDown(4*nn)+shapeNeumann(nn/2)+shapeUp(4*nn)
+hole01(-3*nn)+hole02(-3*nn)+hole03(-3*nn)+hole04(-3*nn)+hole05(-3*nn)
+hole06(-3*nn)+hole07(-3*nn)+hole08(-3*nn)+hole09(-3*nn)+hole10(-3*nn)
+hole11(-3*nn)+hole12(-3*nn)+hole13(-3*nn)+hole14(-3*nn)+hole15(-3*nn)
);
real sizeMesh=0.03;
Omega = adaptmesh (Omega,sizeMesh,IsMetric=1,nbvx=100000);
//////////////////////////////////////////
// Elastični sustav
//////////////////////////////////////////
// Ae(u):e(v)=2mu(e(u):e(v))+lambda(div(u)*div(v))
fespace Vh(Omega,P1);
Vh ux,uy,vx,vy;
problem elasticity([ux,uy],[vx,vy]) =
int2d(Omega)( 2*mu*( dx(ux)*dx(vx)+dy(uy)*dy(vy)+((dx(uy)+dy(ux))*(dx(vy)+dy(vx)))/2.)
+lambda*(dx(ux)+dy(uy))*(dx(vx)+dy(vy)) )
-int1d(Omega,2)(g1*vx+g2*vy)
+on(1, ux=0.0, uy=0.0);
//////////////////////////////////////////
// Konstrukcija vektora silaska
//////////////////////////////////////////
Vh theta1,theta2;
problem shapeDerivative([theta1,theta2],[vx,vy])=
int2d(Omega)(sizeMesh*(dx(theta1)*dx(vx)+dy(theta1)*dy(vx)+dx(theta2)*dx(vy)+dy(theta2)*dy(vy))+theta1*vx+theta2*vy)
+int2d(Omega)(4*mu*(2*(dx(uy)/2 + dy(ux)/2)*((dx(uy)*dx(vx))/2 + (dx(ux)*dy(vx))/2 + (dx(vy)*dy(uy))/2
+ (dy(ux)*dy(vy))/2) + dx(ux)*(dx(ux)*dx(vx) + dx(vy)*dy(ux)) + dy(uy)*(dx(uy)*dy(vx) + dy(uy)*dy(vy)))
+ 2*lambda*(dx(ux) + dy(uy))*(dx(ux)*dx(vx) + dx(uy)*dy(vx) + dx(vy)*dy(ux) + dy(uy)*dy(vy))
-(dx(vx)+dy(vy))*(2*mu*( dx(ux)*dx(ux)+dy(uy)*dy(uy)+((dx(uy)+dy(ux))*(dx(uy)+dy(ux)))/2.)
+lambda*(dx(ux)+dy(uy))*(dx(ux)+dy(uy)))
)
+int1d(Omega,3) (lagr*(vx*N.x+vy*N.y))
+on(1,2,theta1=0.0,theta2=0.0);
//////////////////////////////////////////
// Iteracije
//////////////////////////////////////////
int MaxIter=650;
real vol0=Omega.measure;
real vol;
for (int i=0; i<MaxIter; ++i)
{
elasticity;
shapeDerivative;
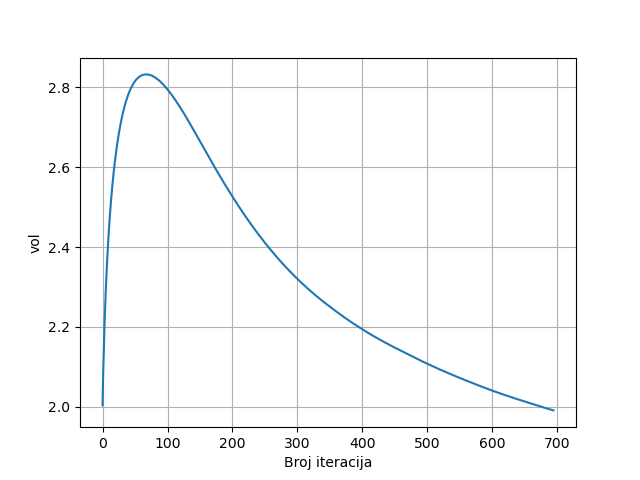
vol=Omega.measure;
//lagr=lagr*(1+0.05*(vol-vol0)/vol0); // držimo konstantni
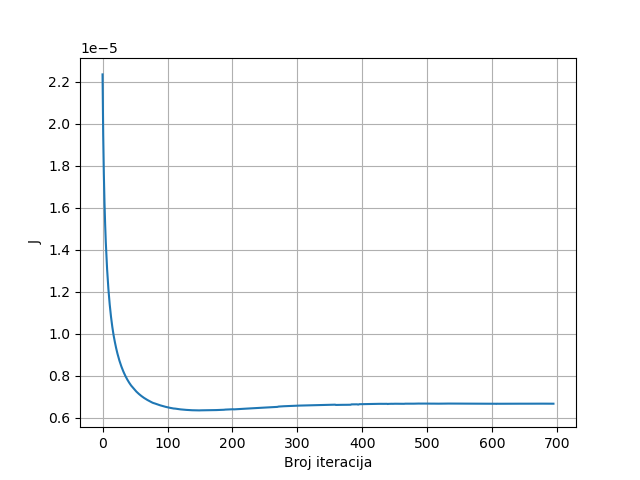
real J=int2d(Omega)( 2*mu*( dx(ux)*dx(ux)+dy(uy)*dy(uy)+((dx(uy)+dy(ux))*(dx(uy)+dy(ux)))/2.)
+lambda*(dx(ux)+dy(uy))*(dx(ux)+dy(uy)) ) ;
if (i%10==0)
{
savevtk("Omega"+i/10+".vtk",Omega,[theta1,theta2],[ux,uy]);
}
data<<J<<" "<<vol<<" "<<J+lagr*vol<<" "<<lagr<<" "<<vol-vol0<<endl;
data.flush;
//////////////////////////////////////////
// Update mesh
//////////////////////////////////////////
real coef=100;
real minT0 = checkmovemesh(Omega, [x, y]);
while(1){
real minT = checkmovemesh(Omega, [x+coef*truncate*theta1,y+coef*truncate*theta2]);
coef/=1.2;
if (minT > minT0/5.0) break;
}
Omega = movemesh(Omega,[x+coef*truncate*theta1,y+coef*truncate*theta2]);
Omega = adaptmesh (Omega,sizeMesh,IsMetric=1,nbvx=100000,hmin=sizeMesh*3.0);
}
Rezultati